
Abstract
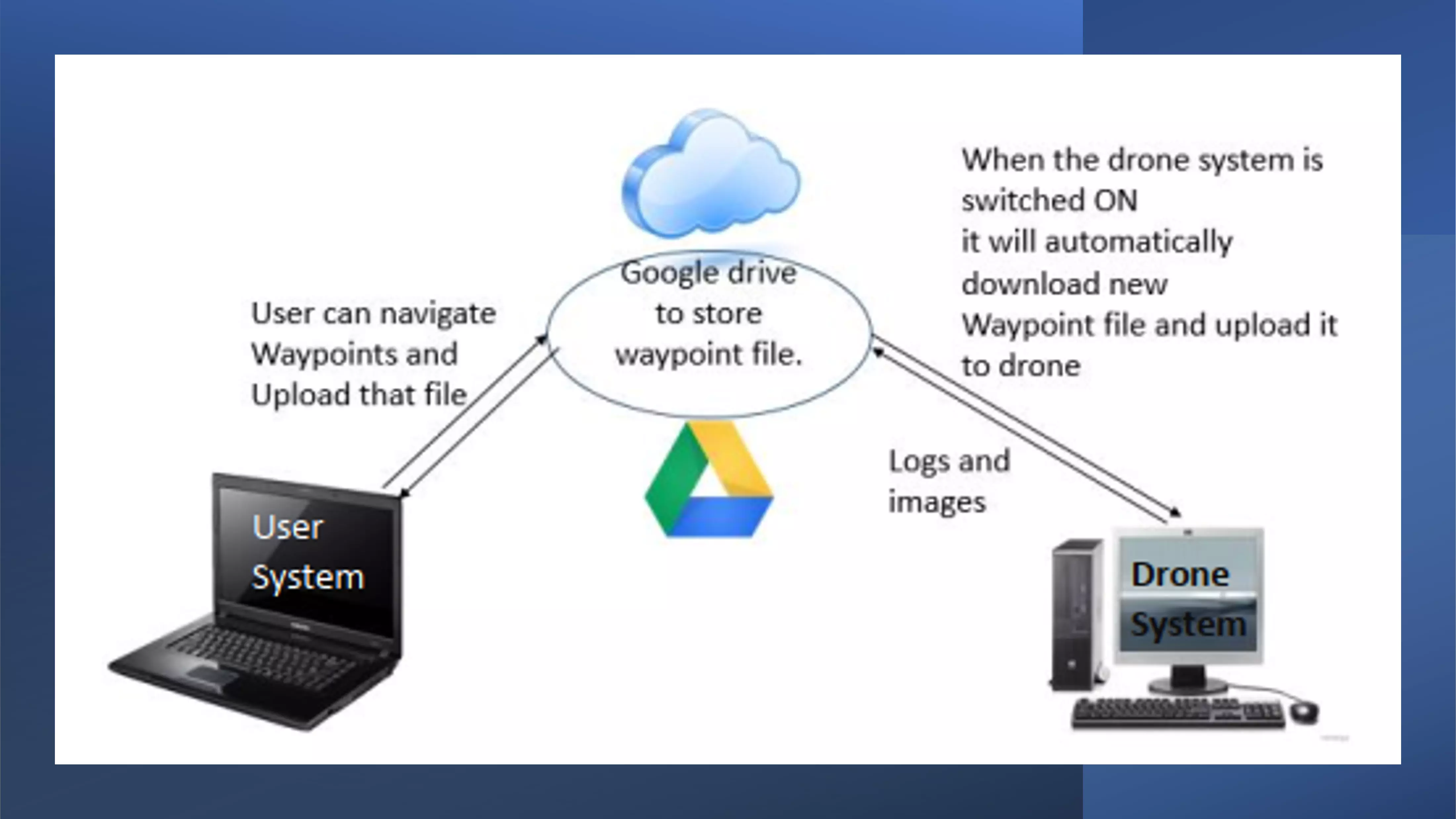
The project's scope was to provide a solution to monitor remote agricultural sites or any rural land without any human interaction with the help of aerial view images. As a solution, we worked on an autonomous drone technology that enables a UAV to fly without real-time human control. The idea was to use a drone and ground station control software to let the user define a flight path and the spots to take pictures. This can be done remotely by sending the flight path to the drone station; likewise, the drone can send the images remotely from the drone station to the user via the cloud. Once the drone is powered ON, it loads the latest flight path data and starts to fly to take pictures. Once the task is completed, it automatically returns to the base. Whenever it’s connected to the charging dock, it automatically connects to the cloud and shares the images with the user. It involves minimal human interaction to operate, like turning ON the drone and connecting it to the charging dock.
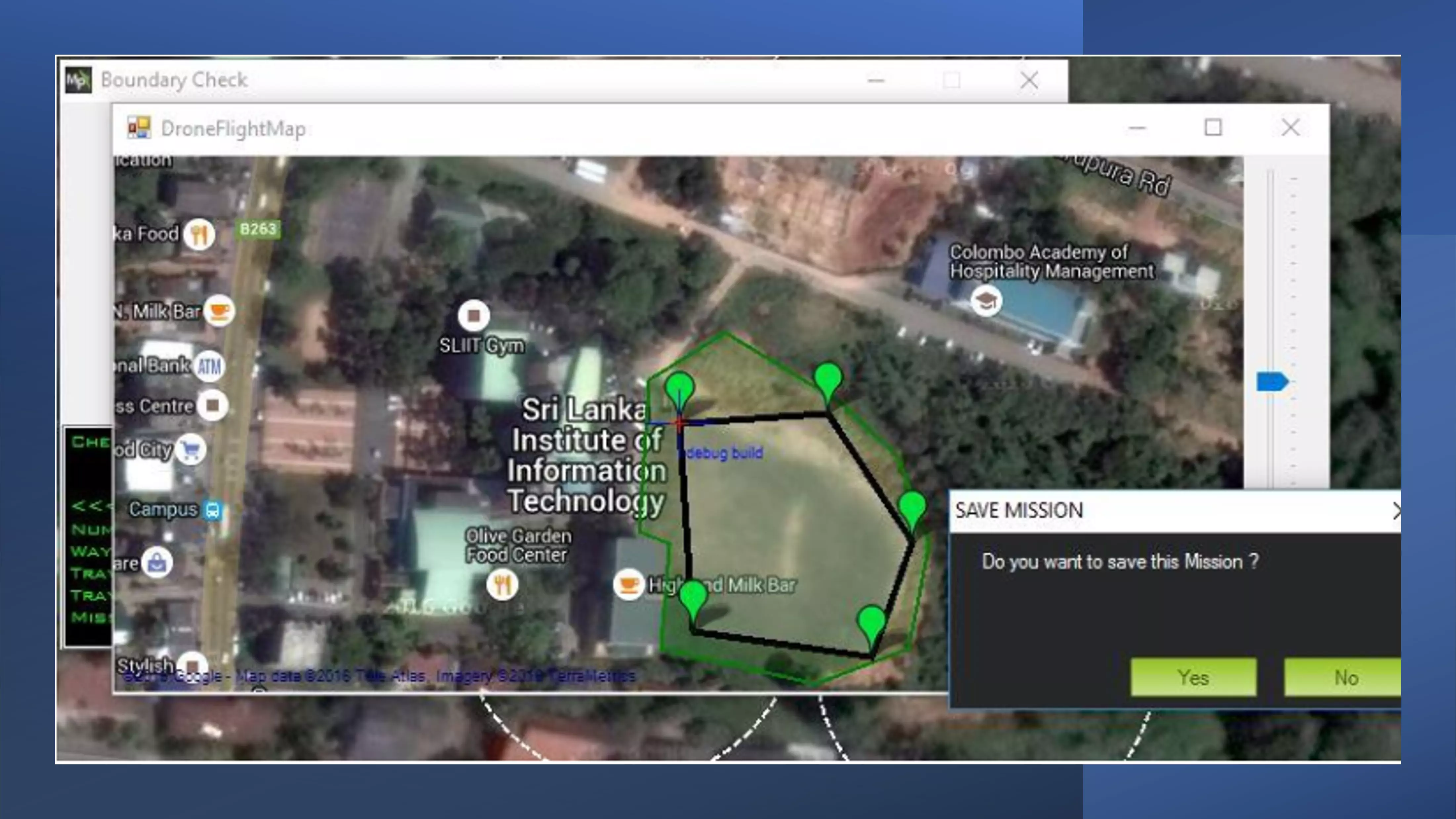
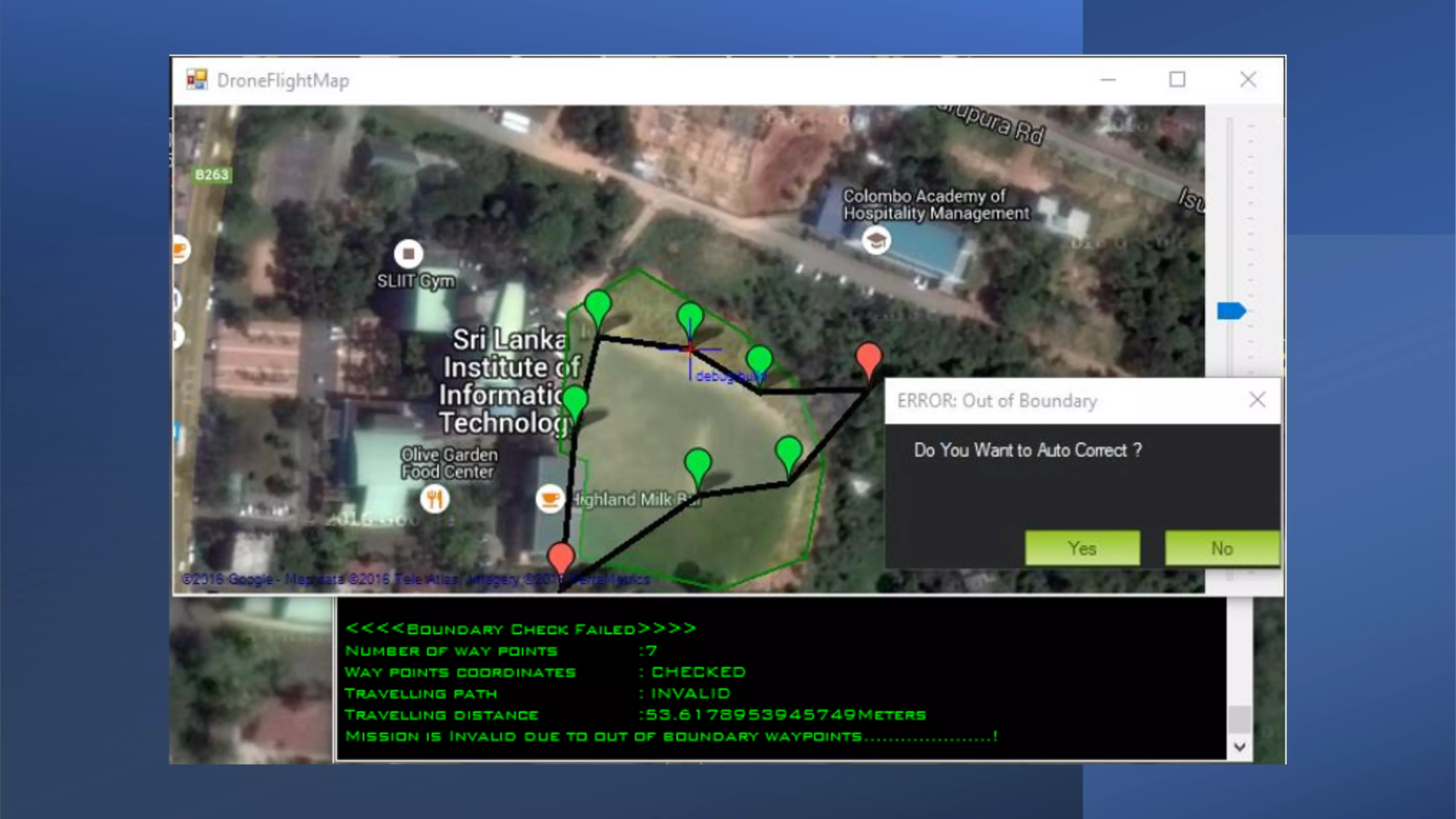
We designed and built the drone from scratch as a part of the project and worked on an open-source project called mission planner for ground station application. We developed and modified the ground station application to be able to send flight data and share aerial view images via cloud. We did not have an object detection mechanism, so the user had to define the flight path within predefined boundary lines. Raycasting algorithm was used to ensure the user-defined path is within the boundary condition. We had a future plans for this project by introducing wireless charging for a drone at the landing pad and image processing for captured ariel view images so that the user can get more specific data. This technology also can be helpful in disaster rescue missions, war zones, or wherever humans cannot access it, as the drone can be automated with the flight path and no need for radio control, which means no coverage limits.
Project Information
- Category: UAV Design and Engineering
- Project date: January 2016 - December 2016
Project Description
Autonomous remote monitoring solution for large-scale agricultural sites using quad-copter/drone with aerial view images. It allows users to have dynamic view on their land and crop conditions without being on-site.
| UAV | Pixhawk | C# | Raycasting algorithm | Remote access | Automation | Cloud |