
Abstract
The flexibility and cost-efficiency of using Unmanned Aerial Vehicles (UAVs) for traffic monitoring have made such a proposition an attractive research topic. Over traditional traffic monitoring methodologies, UAV-based traffic monitoring has distinct advantages, as UAVs have a wider field of view and higher mobility. One of the essential but challenging task for UAV traffic monitoring is vehicle detection, like the detection of moving objects. In this project we discussed the implementation of a CNN-based machine learning model for vehicle detection from low-altitude UAV footage captured over signalized intersections. It was implemented based on the research paper titled “Optimized Vision-Directed Deployment of UAVs for Rapid Traffic Monitoring" published in 2018 at the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV.
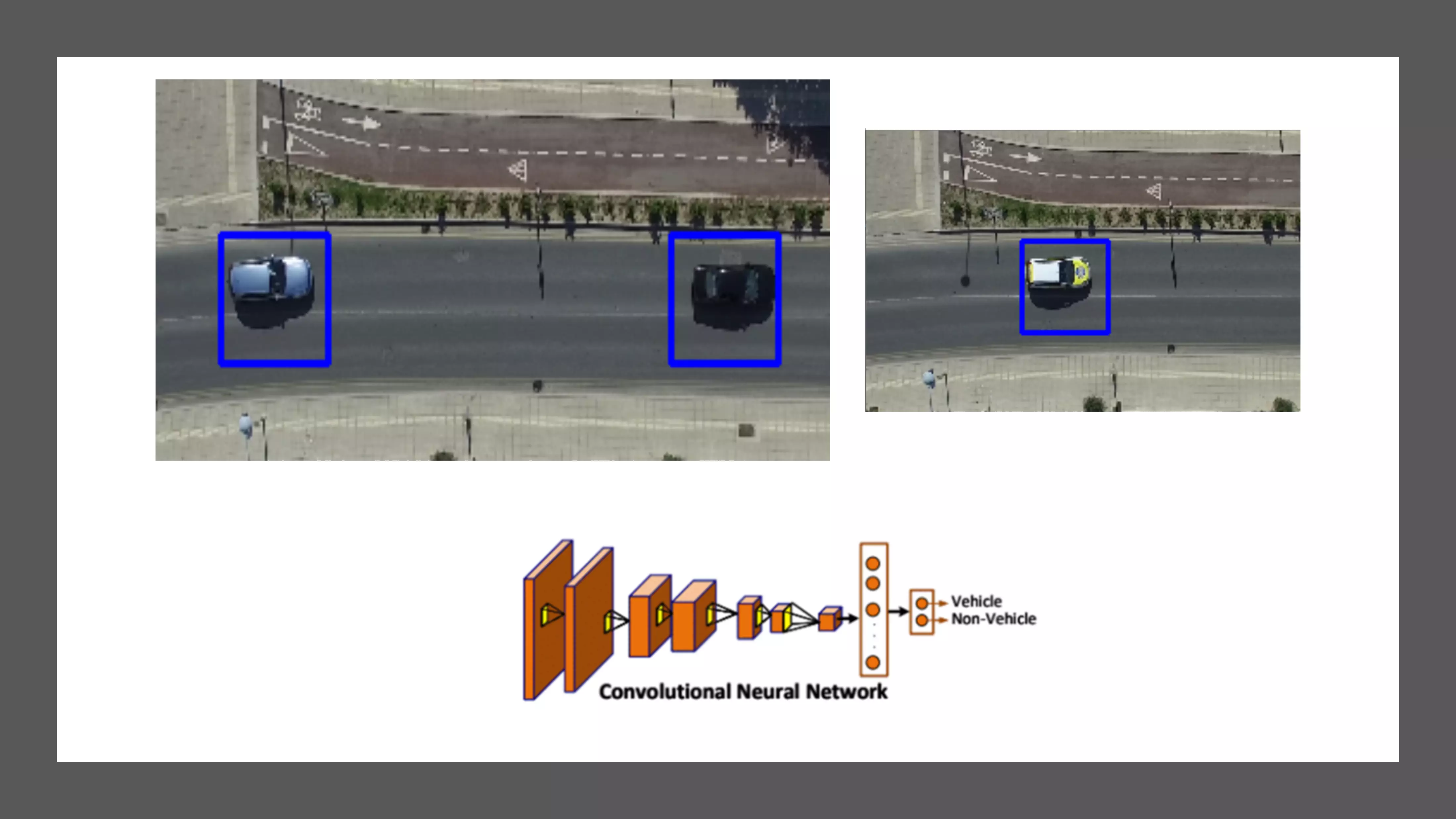
The paper mainly covers the challenges of remotely capturing the information from an aerial view and vehicle detection from the recorded footage. We focused on vehicle detection and tracking from aerial footage by using deep learning. We have seen that the deep learning models outperformed in many fields, especially in computer vision tasks of object detection, recognition and tracking. Following the proposed methodology in our reference research paper, we used a deep convolutional neural network for vehicle detection and tracking from aerial street visuals.
Project Information
- Category: Computer Vision
- Project date: Augest, 2021
- Project URL: Souce Code
Project Description
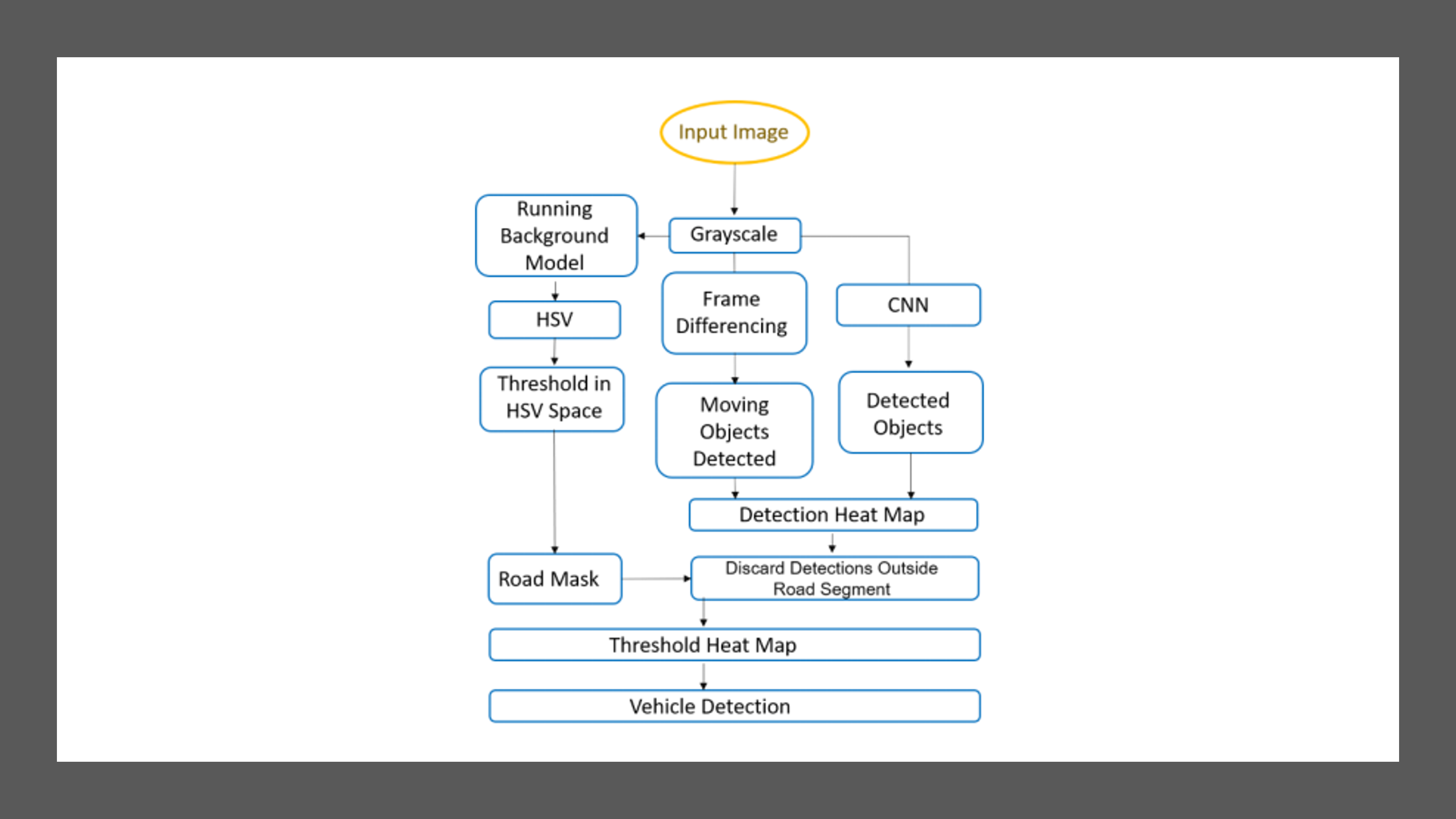
The scope of the project was to implement a cost-effective highway traffic monitoring system, using drones and computer vision technology. The Computer vision approaches were used to process the aerial view drone images and applied the CCN machine learning model to classify and detect vehicles on the road.
| Computer Vision | Machine Learning | CNN | Python | OpenCV |